

Nächster NASA-Mars-Rover: Auswahl der Instrumente
BLOG: Go for Launch

Im Juli/August 2020 wird der nächste Mars-Rover der NASA zum roten Planeten gestartet. Die Ankunft wird Anfang 2021 sein. Die Transferdauer ist ungewöhnlich kurz, aber weder die Abflug- noch die Ankunftsgeschwindigkeiten sind bemerkenswert, weswegen problemlos die bereits flugerprobte Technik der Riesen-Rover-Mission MSL von 2011 wieder zum Einsatz kommen kann, gestartet mit einer Atlas V.
Die Technik der einzelnen Module (Transferstufe, Eintrittsmodul, Skycrane und Rover) ist bereits entwickelt und flugerprobt. Da gibt es also kaum noch Baustellen. Neu sind allerdings die wissenschaftlichen Experimente. Diese haben zumindest mich etwas überrascht. Ich hätte hier mit einem wirklichen astrobiologischen Labor gerechnet, gewissermaßen einem Viking auf Rädern.
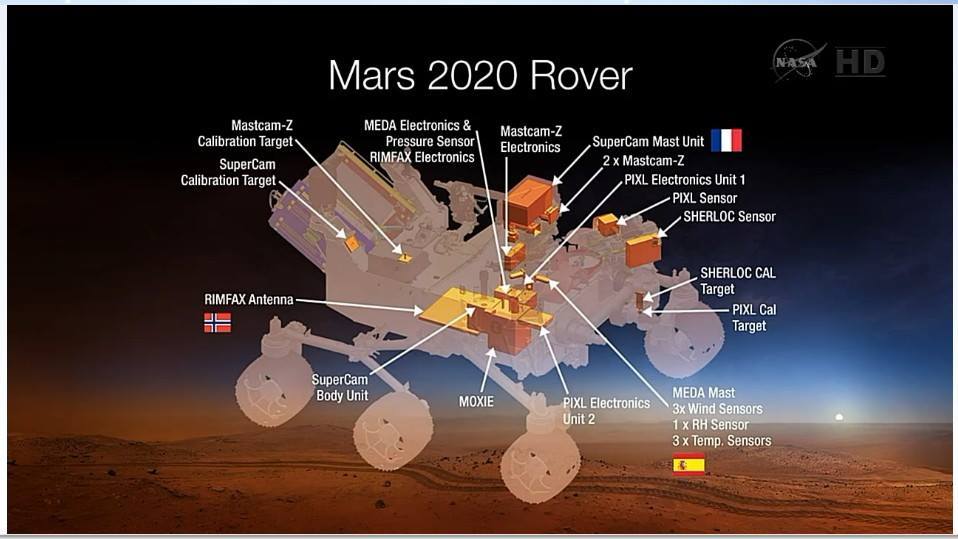
Aber nein. An Bord ist kein “Wet-Chemistry”-Labor. Es handelt sich ausweislich der am 31.7.2014 ausgewählten Instrumentierung eindeutig wieder um eine geologische Mission. Eine Stereokamera auf dem Mast war zu erwarten und ist unverzichtbar. Diverse Spektrometer erlauben die Untersuchung der chemischen Zusammensetzung von Gestein und Mineralien (SuperCam: Ein LIBS wie schon die ChemCam auf MSL), SHERLOC: Ein RAMAN-Spektrometer, PIXL: ein Röntgenfluoreszenzspektrometer), eine Wetterstation, ein bodenpenetrierendes Radar und dann auch noch MOXIE: ein Experiment zur Demonstration der Sauerstofferzeugung aus Kohlendioxid in der Atmosphäre. Hm, muss man das denn unbedingt auf dem Mars demonstrieren? Die NASA ist offenbar dieser Meinung, aber sicher ist der PR-Effekt auch nicht unwillkommen.
Der Verzicht auf eine astrobiologische Ausrichtung der Instrumentierung lässt sich möglicherweise als kluge Entscheidung hin zu einer Maximierung komplementärer Wissenschaft im Gegensatz zum Wettbewerb mit den Europäern deuten. Der ExoMars-Rover der ESA soll ja (vielleicht, hoffentlich) 2018 zum Mars fliegen. Seine wissenschaftliche Ausstattung ist zwar nur noch ein schwacher Abklatsch dessen, was ursprünglich vorgesehen war. Immerhin ist aber noch ein leistungsfähiges GCMS an Bord.
Von bösen Zungen habe ich bereits die Vermutung vernommen, die NASA habe dafür noch etwas Platz freigehalten. Wenn die ESA ihr Rover-Programm an die Wand fährt oder einstellt, bräuchten die dafür entwickelten Instrumente eine alternative Mitfluggelegenheit zum Mars. Mag natürlich sein, aber die astrobiologische Instrumentierung ist ohne einen zur unterirdischen Probenentnahme aus 2 Metern Tiefe fähigen Bohrer wenig wert. Es ist kaum davon auszugehen, dass direkt an der Oberfläche, wo man ohne Bohrer hinkommt, komplexe organische Moleküle die weitgehend ungefiltert auftreffende kosmische Strahlung überleben. Also müsste dann auch noch der ESA-Bohrer mit. Der wäre natürlich, jetzt spekuliere ich nur, an Bord eines schweren Rovers mit permanenter Energiezufuhr gar nicht schlecht aufgehoben.
Das MOMA-Experiment vom ExoMars 2018 und der Bohrer zusammen wären natürlich schon ganz schön schwer. So viel freien Platz kann man wohl kaum vorgesehen haben. Also müsste da eines der jetzt vorgesehenen Experimente wieder rausfliegen. Die bösen Zungen wären nicht böse, hätten sie zu der Frage nicht auch gleich eine böse Theorie parat: Demnach wäre das PR-lastige MOXIE, das außerhalb der eigentlichen wissenschaftlichen Zielsetzung steht, der Kandidat dafür, “to get bumped”. Will ich den Leuten glauben, die sowas sagen? Nicht wirklich. Aber so ganz von der Hand weisen kann ich deren Logik auch nicht.
Auf spaceflightnow.com allerdings wird die gesamtmasse der obogen Instrumente mit nur 40 kg angegeben, was erheblich unter der wissenschaftlichen Nutzmasse von Curiosity liegt. Die Differenz wird durch einen noch zu entwickelnden Bohrer und ein Aufbewahrungssystem für Bodenproben erklärt. Mit Letzerem würde dieser Rover 2020 entweder zu einer Technologiedemonstration oder gar zu einem Bestandteil einer Probenrückführung vom Mars. Eine “Mars Sample Return” wäre so ungefähr die komplexeste und teuerste robotische Mission, die man sich in absehbarer Zukunft vorstellen kann.
Hier steht unter anderem, wie MOXIE funktioniert:
http://www.extremetech.com/extreme/187364-nasas-mars-2020-rover-will-hunt-for-signs-of-life-produce-oxygen-from-mars-atmosphere
Ja, war mir bekannt und untermauert meine Verwirrung darüber, warum man so etwas auf den Mars schickt, anstatt das einfach unter simulierten Bedingungen auf der Erde zu testen.
Allerdings zeigt die Reaktion der Presse, so hier auf SPON, wo es lang geht und warum die NASA genau dieses Experiment zugelassen hat. Darüber wird geredet. Das interessiert die Leute. Der Rest interessiert “nur” die Wissenschaftler oder solche Typen wie mich. Darüber redet man dann auch … im Nachsatz.
Mars-Rover wie MSL und MARS-2020 scheinen mir heute zu komplex. Sie sollten um Minirover ergänzt werden oder alternativ sollten ganze Schwärme von Kleinfahrzeugen auf zu erkundende Planeten/Monde losgeschickt werden.
Der Arxiv-Artikel Spherical Planetary Robot for Rugged Terrain Traversal berichtet über kugelförmige, nur 2 kg schwere Explorer, die über das Terrain rollen und hüpfen können und die hier als Begleiter eines grösseren Fahrzeugs wie des MARS-2020 geplant sind. Ähnliche im Artikel erwähnte sphärische Roboter könnten aber auch auf sich selbst gestellt in kurzer Zeit grosse Distanzen zurücklegen und einen Planeten oder Mond systematisch abfahren. Ausgerüstet mit einer Radionuklidbatterie, ein paar eingebauten Kameras und einem Sender könnte man sich ganze Schwärme von rollenden, je ein paar Kilogramm schweren Marsrobotern vorstellen.
Die Forderung nach miniaturisierten Robotern wird immer wieder mal aufgestellt und diskutiert, auch in diesem Blog. Es ist aber auch so, dass der Nuzmassenanteil nicht linear mit der Masse des Rovers skaliert. Bei den MERs war die Masse der mobilen Einheit eine Masse von um 180 kg. Man liest in verschiedenen Quellen unterschiedliche Zahlen; das NASA Press Kit nennt explizit 174 kg. Davon entfallen auf die Instrumentierung 5 kg, also weniger als 3%.
Beim Mars-Rover des MSL-Mission hatte der Rover eine Masse von 899 kg, wovon laut NASA Press Kit 75 kg auf die wissenschaftliche Nutzmasse entfallen, also mehr als 8%.
Je größer der Rover, desto größer nicht nur seine Nutzlast, sondern auch der Nutzlastanteil. Umgekehrt gilt: Je kleiner der Rover, desto kleiner der Nutzlastanteil, bis er bei Null landet. Dazu muss der Rover gar nicht mal ganz besonders klein werden.
Hinzu kommt, wie bereits mehrfach diskutiert, einzelne Komponenten aus physikalischen Gründen nicht beliebig reduzieren lassen. Das gilt für die Optik, aber auch für Funkantennen.
Minirover sollten nicht verkleinerte Ausgaben von Grossrovern sein, sondern spezialisierte Versionen, beispielsweise mit der einzigen ihnen zugeordneten Aufgabe, das Geländer abzurollen und dabei Fotographien zu machen. Die Daten würden sie nicht direkt zur Erde funken sondern zur Marslandestation, welche sie dann weiterleiten würde.
Missionsbeispiel: Die Marslandestation entlässt unmittelbar nach Landung 10 Minirover a je 100 (mit je 10 kg Nutzmasse) und diese Minirover rollen von der Landestelle aus in alle Richtungen und senden ihre Funkbilder zur Marslandestation, welche sie direkt oder indirekt zur Erde sendet. Die 10 Minirover könnten dabei unterschiedlich ausgerüstet sein: Kameras in unterschiedlichen Spektralbereichen.
Mit einem solchen Konzept könnte man viele Quadratkilometer der Marsoberfläche systematisch abrollen anstatt nur 17 Kilometer in mehreren Jahren zurückzulegen wie das Curiosity bis jetzt gemacht hat.
Man sollte sauber zwischen Wunschvorstellungen und Machbarem unterscheiden.
10% Nutzmassenanteil bei einem 100 kg Rover, obwohl die mit großem Abstand erfahrensten Experten für planetare Rover, nämlich die der NASA, das noch nicht einmal bei großen Rovern schaffen, wo der Nutzmassenanteil höher ist?
Wenn nun schon von melonengroßen Rovern geredet wird, wie in dem von Ihnen zuvor zitierten Paper, was sollen denn die Nutzmassen, die die maximal mitführen könnten (mal angenommen, das wäre überhaupt möglich), noch leisten können? Abgesehen davon, dass kleinere Landefahrzeuge thermisch instabiler sind als große – sie haben eine geringere thermische Trägheit und erhitzen sich oder kühlen schnell ab auf Gleichgewichtstemperatur.
Kleine Objekte haben eine geringere Strahlungsresistenz und geringere Materialstärken, deswegen sind sie auch weniger leistungsfähig und haltbar. Ich halte es für absurd, anzunehmen, dass mit solchen Objekten ein Vielfahes der Strecke zurücklegen kann, die Curiosity zurückgelegt hat. Man schaue sich nur einmal die durchlöcherten Räder von Curiosity an.
Tut mir Leid, aber ich denke, gegenüber solchen Vorstellungen ist etwas gesunder Skeptizismus angebracht.
Spezialisierte Minirover gibt es bis jetzt nicht. Deswegen würde ich die Erfahrungen mit bisherigen Rovern, die jeweils immer möglichst viel können sollten, nicht als Masstab nehmen. Zudem: bei Fragen wie “warum hat Curiosity nach 17 km durchlöcherte Räder?” muss man nach dem tieferen Grund fragen. Liegt es an der Distanz von 17 km, am toxischen Boden oder am langen Zeitraum, der schon vergangen ist?
Hier meine Skizze wie ich mir einen grosse Marsdistanzen abrollenden Minirover vorstelle:
– Annähernd kugelförmig mit wärmender Radionuklidbatterie in der Mitte
– Der Umgebung angepasste, chemoresistente Materialien
– Autonom sich fortbewegend und autonom Hindernissen ausweichend,
nachdem der Roboter eine Zielrichtung zugewiesen erhalten hat. 10 km Fahrleistung pro 24 Stunden.
– Ausgerüstet mit Sensoren, die autonome Fortbewegung und zugleich Erkundung erlauben (Kameras werden zum Fahren und zugleich zum Entdecken verwendet).
– Funkkontakt mit Miniaturradioempfänger/sender über Kurzwelle (kein Sichtkontakt nötig, 30 km Maximaldistanz zu Lander der als Zwischenstation dient).
Die Minimalanforderung ist doch Mobilität und das Widerstehen der Umgebungsbedingungen. Da sind die Erfahrungen mit den aktuellen Rovern aussagekräftig. Sie mögen einem nicht genehm sein – das macht sie aber nicht irrelevant.
Warum hat Curiosity durchlöcherte Räder? Wegen der Abnutzung durch die fortgesetzte mechanische Belastung.
Man geht übrigens bei Rovern von einer täglichen Fahrleistung aus, die in Dutzenden Metern gemessen wwird. Typischerweise so um die 50, vielleicht mal 100 oder mehr, wenn es ganz glatt läuft. Sie schreiben da mal eben so “10 km pro Tag”.
Offensichtlich verfügen Sie da über Zugang zu ganz besonders fortschrittlichen Informationsquellen.
Nach Antworten in Why don’t Mars rovers move faster? wäre eine Fahrleistung von 10 km in 24 Stunden durchaus in die Rover eingebaut.
Mike Thielmann, der am JPL mit Curiosity arbeitete, antwortet:
Robert Frost von der NASA dagen sagt:
Wenn das raue Terrain und die schwache elektrische Leistung das Problem ist, dann wäre die Lösung ein Fahrzeug, das nicht viel mehr als eine rollende Kugel ist und welche relativ zum Totalgewicht eine grosse Radionuklidbatterie hat. Having a Ball on Mars stellt die Extremversion davon dar.
Die Antworten, aus denen Sie etwas selektiv zitiert haben, zeigen vor allem eines, dem ich vor dem Hintergrund von mittlerweile mehr als 15 Jahren bei ExoMars vollkommen zustimme: Es gibt nicht den einen Grund, sondern eine Vielzahl Gründe, warum die Fortbewegungsgeschwindigkeit begrenzt ist. Sie sind ja ziemlich schnell bei Behauptungen, wie das alles viel besser und um Größenordnungen leichter und schneller gemacht werden kann. Wie gesagt, vielleicht haben Sie einen Informationsvorsprung – das stelle ich nicht in Abrede.
Die Idee von ganz anders konzipierten Rovern, die sich anders fortbewegen, ist ja nicht auf meinem eigenen Mist gewachsen. Es gibt auch einige NASA-Studien dazu – sie wurden nur nie umgesetzt. Könnte es nicht sein, dass die NASA oder auch ESA ungern den eingeschlagenen Pfad verlässt und mal etwas neues ausprobiert?
Für eine Mission zum Titan wurde als alternatives Design ein Tensegrity Roboter entworfen.
Ich habe generell den Eindruck, dass bei der NASA sehr viel Interessantes und Vielversprechendes in NIAC-Programmen (NASA Innovative Advanced Concepts) angestossen und entwickelt wird, aber praktisch nichts davon irgendwann eingesetzt wird. Wäre es nicht gerade die Aufgabe der NASA Dinge neu anzugehen, neue Perspektiven für die zukünftige Raumfahrt zu entwickeln und umzusetzen.
Ich denke, man sollte sich nicht einfach immer gleich in die coolste Idee verlieben, sondern muss die Machbarkeit und das Für und Wider realistisch und nüchtern betrachten.