

Jenga und die Fusionsforschung
BLOG: Formbar

Das Fusionsexperiment ITER soll zeigen, dass es tatsächlich möglich ist, die Kernfusion als Energiequelle zu nutzen. Dazu wird ITER erstmals mehr Energie durch Fusionsreaktionen erzeugen, als Energie an Heizleistung in das Plasma gesteckt wird. Es ist allerdings nicht das erste mal, dass die zugrunde liegende Kernfusion von Deuterium und Tritium in einem Fusionsexperiment untersucht wird: JET untersuchte bereits 1991 diese Reaktion und erzeugte damit auch Energie.
Bei JET, was für Joint European Torus steht, handelt es sich (wie ITER) um einen Tokamak und zwar den derzeit größten der Welt. Das Experiment befindet sich in Culham, wird aber von einem gemeinsamen europäischen Verbund betrieben. Das erste Plasma wurde in JET bereits 1983 erzeugt, die ersten Deuterium-Tritium Experimente wurden 1991 durchgeführt. JET hält mit einem Q-Wert von ca. 0.7 auch den Rekord an erzeugter Fusionsleistung. Der Q-Wert beschreibt das Verhältnis von erzeugter Fusionsleistung zu aufgewendeter Heizleistung. ITER soll diesen Wert auf ca. 10 steigern.
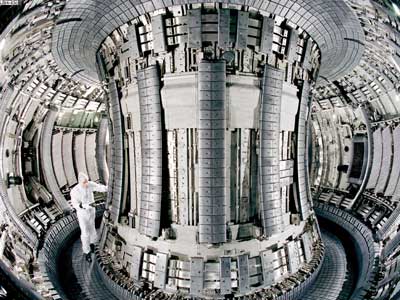
Wissenschaftler in JET, Quelle: EFDA-JET
Bei der Fusion von Deuterium und Tritium entstehen ein Heliumkern und ein Neutron. Die Neutronen können sich nun an den Atomkernen der Wandmaterialien “anlagern” und aktivieren diese damit. Die Wandmaterialien können so radioaktiv werden. Man wählt hier zwar Materialien deren Halbwertszeit sehr kurz ist, allerdings ist es nach Deuterium-Tritium Experimenten für eine gewisse Zeit nicht möglich, Wartungsarbeiten am Experiment vorzunehmen. Wartungsarbeiten oder Umbauten fallen an Experimenten dieser Größe allerdings ständig an. Also muss ein Fernwartungssystem her.
Ein solches System ist auch für ITER notwendig, jedes Eckchen innerhalb des Torus sollte mit diesem System erreichbar sein. An JET konnten dies bezüglich wertvolle Erfahrungen gesammelt werden. Bei diesen Fernwartungssystemen handelt es sich nicht um autonome Systeme, vielmehr sitzt der Ingenieur oder Physiker ein paar Räume weiter und kontrolliert aus sicherer Entfernungen einen Roboterarm mit dem er dann beispielsweise bestimmte beschädigte Komponenten austauscht. Bedienfehler sollten natürlich vermieden werden, also wird ausgiebig trainiert bevor der erste Einsatz am echten Experiment erfolgt. Und was eignet sich dazu besser als das allseits bekannte Geschicklichkeitsspiel Jenga? Richtig, mir fällt da auch nichts ein. Aber schaut es euch in dem folgenden Video selbst an.
Abschließend bleibt mir nur zu sagen, dass ich euch allen ein frohes Weihnachtsfest und einen guten Rutsch ins neue Jahr wünsche und danke, dass ihr mir trotz der niedrigen Blogfrequenz bisher immer treu geblieben seit 🙂
Dir auch..
ein schönes Weihnachtsfest!
Feinmotorik
Weil meine Feinmotorik nicht so genau ist, meine Hände nicht so ruhig sind, und meine Geduld nicht so gross ist, habe ich die einzelnen Teilbewegungen vorher abgespeichert.
Der matt-versilberte Objektträger im Video ist 75 mm mal 25 mm gross.
Mikro Robot Galvanoplastik, Video, 2,4 Minuten:
http://www.youtube.com/watch?v=UYfhu0frLAI
—
Ein frohes Weihnachtsfest!
Weihnachtliche Animationen:
http://members.chello.at/….bednarik/ADVKRA-2.gif
http://members.chello.at/karl.bednarik/BAUMUF.gif
(Wenn diese *.gif-Animationen nicht laufen, dann liegt es an den Einstellungen der persönlichen Firewall.)
Nachtrag:
Für solche Telemanipulatoren schlage ich noch einige Pedale vor:
1. Untersetzung 1 zu 10,
2. Auskuppeln der Handbewegungen, um nach der Verwendung der Untersetzung neu beginnen zu können,
3. Umschalten auf Potentiometer oder Tasten, die einzelne Motoren oder Motorgruppen direkt steuern, so dass man seine Hände nicht im Raum ruhig halten muss, sondern auf ein Schaltpult legen kann,
4. Speicherung aller Bewegungen und Stellungen, damit man jede Tätigkeit nur einmal machen muss.
@Karl
Haben Sie den im Video gezeigten Manipulator selbst gebaut? Falls ja: sehr schön!
Hallo Alf Köhn,
danke für das Lob.
Es gibt hier noch einige Fotos, Zeichnungen, Animationen, Videos, und Texte zu meinem Manipulator:
Auf meiner Internetseite:
http://members.chello.at/karl.bednarik/
unter: “Robotik”,
und in Nanomedizin und Nanotechnologie:
http://members.chello.at/karl.bednarik/NANO3.html
unter: “Der lange Weg in die Mikrowelt”.
—
Ich bin ganz davon abgekommen, meine Hände im Raum ruhig zu halten.
Ich verwende deshalb meine Vorschläge 1 + 3 + 4 nicht als Pedale, sondern direkt auf dem Schaltpult.
Weil zwischen dem Schaltpult und dem Manipulator noch ein Computer geschaltet ist, geht sehr bald alles vollautomatisch.
Das bin ich meiner Faulheit schuldig.
Doc Ock
Der Weg zu Doktor Octopus ist nicht mehr weit.
Hallo Henning,
ich dachte eigentlich mehr an “Waldo F. Jones’ Synchronous Reduplicating Pantograph” von Robert A. Heinlein aus dem Jahre 1942.
http://en.wikipedia.org/wiki/Waldo_(short_story)
Ich selbst habe die Idee von hier:
Philip. K. Dick, 1954:
http://www.polyamory.org/…echnology/Autofac.html
Philip. K. Dick, 1954: (alternativ)
http://www.technovelgy.com/ct/content.asp?Bnum=793
und auch von hier:
Richard. P. Feynman, 1959, deutsch:
http://www.imtek.de/…room_at_the_bottom_(feynman).pdf
Richard. P. Feynman, 1959, englisch:
http://www.zyvex.com/nanotech/feynman.html
Noch einige Bilder, um auf den Geschmack zu kommen:
http://members.chello.at/….bednarik/HARABZW3.PNG
http://members.chello.at/karl.bednarik/ANTRIE1.JPG
http://members.chello.at/karl.bednarik/ANTRIE3.JPG
Technische Probleme
Bei
http://en.wikipedia.org/wiki/Waldo_(short_story)
wird die hintere Klammer “)” nicht erkannt.
Bei
http://www.imtek.de/…room_at_the_bottom_(feynman).pdf
wird sogar die Gruppe “).pdf” am Ende nicht erkannt.
Da auch in der Mitte einiges durch drei Punkte ersetzt wurde, hier noch einmal, aber aufgeteilt:
http://www.imtek.de/anwendungen/content/
upload/vorlesung/2006/mst_t&p_00__plenty_of_room_at_the_bottom_(feynman).pdf
@Karl
“There is plenty of room at the bottom” ist natürlich ein Klassiker. Kann man vielleicht gerade jetzt, wenn man eventuell etwas Zeit hat, gerne mal wieder anschauen.